城市
城市
 2021-04-09
2021-04-09  340人浏览
340人浏览  鱼爪网
鱼爪网
本公开涉及自动化设备技术领域,特别涉及一种智能灭蝗装置、系统及方法。
背景技术:
本部分的陈述仅仅是提供了与本公开相关的背景技术,并不必然构成现有技术。
蝗虫肆虐,导致很多国家的农作物大量减产和农田遭受破坏。蝗灾形势严峻,捕杀蝗虫势在必行。
发明人发现,目前,捕杀蝗虫主要存在以下几种方式:(1)化学防治:使用杀虫剂等,但有毒性,对人和农作物会产生毒害作用,也对环境有害;(2)生物防治:进行牧鸭治蝗,使用鸡鸭等生物捕食蝗虫,但仅对小规模蝗灾起有限效果,还可能使生物中毒;(3)火烧法:易导致更大的火灾。
技术实现要素:
为了解决现有技术的不足,本公开提供了一种智能灭蝗装置、系统及方法,具备环保无公害、高效持续、结构简单和经济可靠的特点,实现了蝗灾的有效治理。
为了实现上述目的,本公开采用如下技术方案:
本公开第一方面提供了一种智能灭蝗装置。
一种智能灭蝗装置,包括:无人机以及与无人机连接的电击网,电击网包括横向排布的多条竖向线电极以及纵向排布的多个横向隔离杆;
每根隔离杆与所有线电极固定连接,且每根隔离杆的两端均设有球体,纵向相邻的两个球体相互接触。
作为可能的一些实现方式,各条相邻线电极之间的横向间距相同,各个相邻隔离杆之间的纵向间距相同。
作为可能的一些实现方式,球体为氦气球,各个氦气球充气后的尺寸和形状相同。
作为可能的一些实现方式,无人机与水箱固定连接,水箱上设有第一方向舵,水箱的两侧分别固定有一个相互对称的第一滑翔翼式支撑杆;
第一滑翔翼式支撑杆的底部与喷水杆固定连接,喷水杆与最顶部隔离杆固定连接,喷水杆的出水端口朝向电击网移动方向,水箱与喷水杆通过管路连通,水箱与喷水杆的管路上设有与微控制器连接的电磁阀。
作为可能的一些实现方式,电击网最底部的隔离杆与第二滑翔翼式支撑杆连接,第二滑翔翼式支撑杆的两侧对称设有第二方向舵。
作为可能的一些实现方式,线电极为交叉设置的扫描电极。
本公开第二方面提供了一种智能灭蝗系统,包括多个本公开第一方面所述的智能灭蝗装置,各个无人机组成编队,各个电击网交叉设置。
本公开第三方面提供了一种智能灭蝗方法,利用本公开第一方面所述的智能灭蝗装置,包括以下步骤:
在有蝗虫时,无人机携带电击网升空,无人机根据导航路线带动电击网运动;
线电极通电,且喷水杆喷水,蝗虫碰到线电极或者穿过线电极之间的空隙时被电击。
本公开第四方面提供了一种智能灭蝗装置。
一种智能灭蝗装置,包括:无人机以及与无人机连接的电击网,电击网包括纵向排布的多个横向喷水管,各个喷水管之间通过连接件连接;
顶部第二根喷水管到最底端的喷水管,每根喷水管上固定有至少一根与喷水管平行的线电极;
喷水管的出水端口与电击网的移动方向垂直,且喷水管的内部设有与正电极连接的导电极,每根喷水管的两端均设有球体,纵向相邻的两个球体相互接触。
作为可能的一些实现方式,各条相邻线电极之间的纵向间距相同,各个相邻喷水管之间的纵向间距相同。
作为可能的一些实现方式,球体为氦气球,各个氦气球充气后的尺寸和形状相同。
作为可能的一些实现方式,无人机与第一方向舵固定连接,第一方向舵的两侧固定有第一滑翔翼式支撑杆,第一滑翔翼式支撑杆的底部与喷水管固定连接,喷水管的出水端口与电击网的移动方向垂直;
第一方向舵所在位置固定有水箱,水箱与喷水管通过管路连通,水箱与喷水管的管路上设有与微控制器连接的电磁阀。
作为可能的一些实现方式,电击网最底部的喷水管与第二滑翔翼式支撑杆连接,第二滑翔翼式支撑杆的两侧对称设有第二方向舵。
本公开第五方面提供了一种智能灭蝗系统,包括多个本公开第四方面所述的智能灭蝗装置,各个无人机组成编队,各个电击网交叉设置。
本公开第六方面提供了一种智能灭蝗方法,利用本公开第四方面所述的智能灭蝗装置,包括以下步骤:
在有蝗虫时,无人机携带电击网升空,无人机根据导航路线带动电击网运动;
线电极通电,且喷水管喷水,形成无阻碍高压电击区,用于电击杀灭蝗群。
与现有技术相比,本公开的有益效果是:
1、本公开所述的智能灭蝗装置、方法或系统,具备环保无公害、结构简单、高效持续、经济可靠等特点,实现了蝗灾的有效治理;
2、本公开所述的智能灭蝗装置、方法或系统,电击网结构稳定且轻盈,利用相邻两球体以任何角度接触时的间距相同,可使两端装有球体的相邻隔离杆或者喷水杆在任何角度接触的间距也都相同,进而使在杆上固定连接的多条线电极或者多条连接线在电击网扭摆时能够保持张紧,同时,全部充满氦气的球体可提供向上的浮力,减轻了电击网的重量;
3、本公开所述的智能灭蝗装置、方法或系统,杀灭蝗群效率高,电击网由无人机携带飞行作业,实现了主动扑杀蝗虫,自动实时喷洒,增加了电击网附近空气湿度且淋湿蝗虫,减小了空气电阻和蝗虫体电阻,增强了电击效果,也加宽了线电极间距,避免堵塞电击网,始终保持高效持续消灭蝗群。而常见电网网格排布比较紧密,电网极易被粘附堵塞,容易出故障,且固定于地上,被动杀灭害虫,效率较低;
4、本公开所述的智能灭蝗装置、方法或系统,滑翔翼式支撑杆做成滑翔机机翼形式,是为保证电击网水平状态,增加了翼长和刚性,加长了电击网横向宽度,增大了杀灭蝗群范围,提高了灭蝗效率;同时,滑翔翼式支撑杆增大了向上的升力,减轻了无人机负载;
5、本公开所述的智能灭蝗装置、方法或系统,电击网采用扫描方式,既可防止电击网功率过大,又可避免个别电极组短路,致使整个电击网瘫痪;
6、本公开所述的智能灭蝗装置、方法或系统,线电极和喷水杆的水,形成无阻碍高压电击区,增加了电击区及其周边的湿度,减小了空气电阻和蝗虫体电阻,增强了电击效果;无阻碍电击区实现了免清理,无需人工清洗,保证其高效、持续杀灭蝗群;
本公开附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本公开的实践了解到。
附图说明
构成本公开的一部分的说明书附图用来提供对本公开的进一步理解,本公开的示意性实施例及其说明用于解释本公开,并不构成对本公开的不当限定。
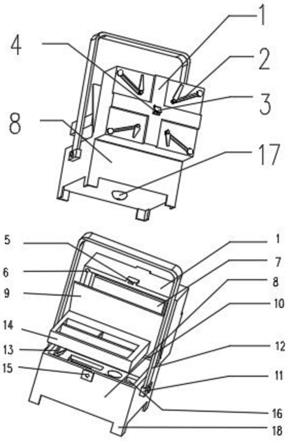
图1为本公开实施例1提供的智能灭蝗装置的结构示意图。
图2为本公开实施例1提供的电极示意图。
图3为本公开实施例1提供的电路框图。
图4为本公开实施例1提供的喷水装置示意图。
图5为本公开实施例2或实施例5提供的无人机编队示意图。
图6为本公开实施例4提供的喷水式智能灭蝗装置的结构示意图。
图7为本公开实施例4提供的电路框图。
图8为本公开实施例4提供的喷水部分示意图。
1、无人机;2、蓄水箱;3、喷水杆;4、隔离杆;5、充气球体;6、线电极;6-1、连接件;7-1、第一滑翔翼式支撑杆;7-2、第二滑翔翼式支撑杆;8-1、第一方向舵;8-2、第二方向舵;9、信号调理电路;10、压力传感器;11、电磁阀驱动电路;12、电磁阀;13、气泵驱动电路;14、气泵;15、微控制器;16、扫描驱动电路;17、脉冲产生电路;18、开关管;19、限流电阻器;20、高压模块;21、喷水管;21-1、导电极;21-2、出水端口;22、喷水杆连接线。
具体实施方式
下面结合附图与实施例对本公开作进一步说明。
应该指出,以下详细说明都是示例性的,旨在对本公开提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本公开所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本公开的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
在本公开中,术语如“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“侧”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本公开各部件或元件结构关系而确定的关系词,并非特指本公开中任一部件或元件,不能理解为对本公开的限制。
本公开中,术语如“固接”、“相连”、“连接”等应做广义理解,表示可以是固定连接,也可以是一体地连接或可拆卸连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的相关科研或技术人员,可以根据具体情况确定上述术语在本公开中的具体含义,不能理解为对本公开的限制。
在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。
实施例1:
如图1所示,本公开实施例1提供了一种智能灭蝗装置,包括:无人机1以及与无人机连接的电击网;
电击网包括横向排布的多条竖向线电极6和纵向排布的多个横向隔离杆4;
每根隔离杆4与所有线电极6固定连接,且每根隔离杆4的两端均设有充气球体5,纵向相邻的两个充气球体5相互接触,其中,充气球体5内充有氦气,且各个充气球体5充气后的尺寸和形状相同,可以理解的,在其他一些实施方式中,各个充气球体充气后的尺寸和形状也可以不相同,只要能够保证电极在任何角度保持张紧即可,本领域技术人员可以根据具体工况进行选择,这里不再赘述。
本实施例中,各条相邻线电极之间的横向间距相同,各个相邻隔离杆之间的纵向间距相同,可以理解的,在其他一些实施方式中,各条相邻线电极之间的横向间距也可以不相同,各个相邻隔离杆之间的纵向间距也可以不相同,只要能够实现蝗虫的有效灭杀距离即可,本领域技术人员可以根据具体工况进行选择,这里不再赘述。
无人机1与蓄水箱2固定连接,蓄水箱2分别与第一方向舵8-1和第一滑翔翼式支撑杆7-1固定连接,两个第一滑翔翼式支撑杆7-1以第一方向舵8-1相互对称,第一滑翔翼式支撑杆7-1的底部与喷水杆固定连接,喷水杆与最顶部隔离杆固定连接,喷水杆的出水端口与电击网移动方向一致;
第一方向舵所在位置固定有蓄水箱2,蓄水箱2与喷水杆3通过管路连通,蓄水箱2与喷水杆3的管路上设有与微控制器15连接的电磁阀12。
电击网最底部的隔离杆与第二滑翔翼式支撑杆7-2连接,第二滑翔翼式支撑杆7-2的两侧对称设有第二方向舵8-2。
线电极为交叉设置的扫描电极,如图2所示,采用扫描方式既可防止电击网功率过大,又可避免个别电极组短路,致使整个电击网瘫痪。
如图3所示,为具体的控制电路框图,包括信号调理电路9、压力传感器10、电磁阀驱动电路11、电磁阀12、气泵驱动电路13、气泵14、微控制器15、扫描驱动电路16、脉冲产生电路17、开关管18、限流电阻器19、高压模块20。
微控制器15通过信号调理电路9与压力传感器10连接,压力传感器10用于实时监控蓄水箱内的压力变化,使得喷水杆的喷水压力保持稳定。
微控制器15通过气泵驱动电路13与气泵14连接,通过气泵14实现充气球体的充气,使得相邻的各个球体相互接触。
微控制器15通过脉冲产生电路17与高压模块20连接,高压模块20与限流电阻器19连接,限流电阻器与开关管18的连接,开关管18与线电极连接,微控制器15还通过扫描驱动电路16与开关管18连接。
如图4所示,微控制器15通过电磁阀驱动电路11与电磁阀12连接,通过电磁阀12的开闭控制喷水杆的出水。
实施例2:
如图5所示,本公开实施例2提供了一种智能灭蝗系统,包括多个本公开实施例1所述的智能灭蝗装置,各个无人机组成编队,各个电击网交叉设置。
实施例3:
本公开实施例3提供了一种智能灭蝗方法,利用本公开实施例1所述的智能灭蝗装置,包括以下步骤:
在有蝗虫时,无人机携带电击网升空,无人机根据导航路线带动电击网运动;
线电极通电,且喷水杆向电击网移动方向喷水,蝗虫碰到线电极或者经过线电极之间的空隙时被电击。
实施例4:
如图6所示,本公开实施例4提供了一种智能灭蝗装置,包括:无人机1以及与无人机连接的电击网,电击网包括纵向排布的多个横向喷水管21,自上而下的第二根喷水管到最底部的喷水管中,每根喷水管21上通过线电极连接件6-1固定有至少一个与喷水管21平行的线电极6,各个喷水管21通过多条竖向的喷水杆连接线22固定连接,喷水杆连接线22的一端与第一滑翔翼式支撑杆7-1连接,喷水杆连接线22的另一端与第二滑翔翼式支撑杆7-2连接。
喷水管21的出水端口与电击网的移动方向垂直,且喷水管21的内部设有与正电极连接的导电极21-1,且每根喷水管21的两端均设有充气球体5,纵向相邻的两个充气球体5相互接触,其中,充气球体5内充有氦气,且各个充气球体5充气后的尺寸和形状相同,可以理解的,在其他一些实施方式中,各个充气球体充气后的尺寸和形状也可以不相同,只要能够保证电极在任何角度保持张紧即可,本领域技术人员可以根据具体工况进行选择,这里不再赘述。
各条相邻线电极6之间的纵向间距相同,各个相邻喷水管21之间的纵向间距相同,可以理解的,在其他一些实施方式中,各条相邻线电极之间的横向间距也可以不相同,各个相邻隔离杆之间的纵向间距也可以不相同,只要能够实现蝗虫的有效灭杀距离即可,本领域技术人员可以根据具体工况进行选择,这里不再赘述。
无人机1与第一方向舵8-1固定连接,第一方向舵8-1与蓄水箱2连接,蓄水箱2两侧与第一滑翔翼式支撑杆7-1连接,两个第一滑翔翼式支撑杆7-1以第一方向舵8-1相互对称,第一滑翔翼式支撑杆7-1的底部与最顶部的喷水管21固定连接,喷水杆的出水端口与电击网的移动方向垂直;
蓄水箱2与喷水管21通过管路连通,蓄水箱2与喷水管21的管路上设有与微控制器连接的电磁阀12。
电击网最底部的喷水杆与第二滑翔翼式支撑杆7-2连接,第二滑翔翼式支撑杆7-2的两侧对称设有第二方向舵8-2。
如图7所示,为具体的控制电路框图,包括信号调理电路9、压力传感器10、电磁阀驱动电路11、电磁阀12、气泵驱动电路13、气泵14、微控制器15、脉冲产生电路17、高压模块20。
微控制器15通过信号调理电路9与水箱内压力传感器10连接,压力传感器用于实时监控蓄水箱内的压力变化,使得喷水杆的喷水压力保持稳定。
如图8所示,微控制器15通过电磁阀驱动电路11与电磁阀12连接,通过电磁阀12的开闭控制喷水管21的出水。
微控制器15通过气泵驱动电路13与气泵14连接,通过气泵14实现充气球体的充气,使得相邻的各个球体相互接触。
微控制器15通过脉冲产生电路17与高压模块20连接,高压模块20与导电极连接。
实施例5:
本公开实施例5提供了一种智能灭蝗系统,包括多个本公开实施例4所述的智能灭蝗装置,各个无人机组成编队,各个电击网交叉设置。
实施例6:
本公开实施例6提供了一种智能灭蝗方法,利用本公开实施例4所述的智能灭蝗装置,包括以下步骤:
在有蝗虫时,无人机携带电击网升空,无人机根据导航路线带动电击网运动;
线电极通电,且喷水杆喷水,形成无阻碍高压电击区,用于电击杀灭蝗群。
以上所述仅为本公开的优选实施例而已,并不用于限制本公开,对于本领域的技术人员来说,本公开可以有各种更改和变化。凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。

 上一篇: 一种方形烧草枪的制作方法
上一篇: 一种方形烧草枪的制作方法 下一篇: 一种便携式伸缩园林农药喷雾器及其增压方法与流程
下一篇: 一种便携式伸缩园林农药喷雾器及其增压方法与流程
 371人浏览
371人浏览  鱼爪网
鱼爪网